Modelling and Control of a Rotary Inverted Pendulum
PID, LQR, and energy-based swing-up LQR on Quanser Qube Servo 2. 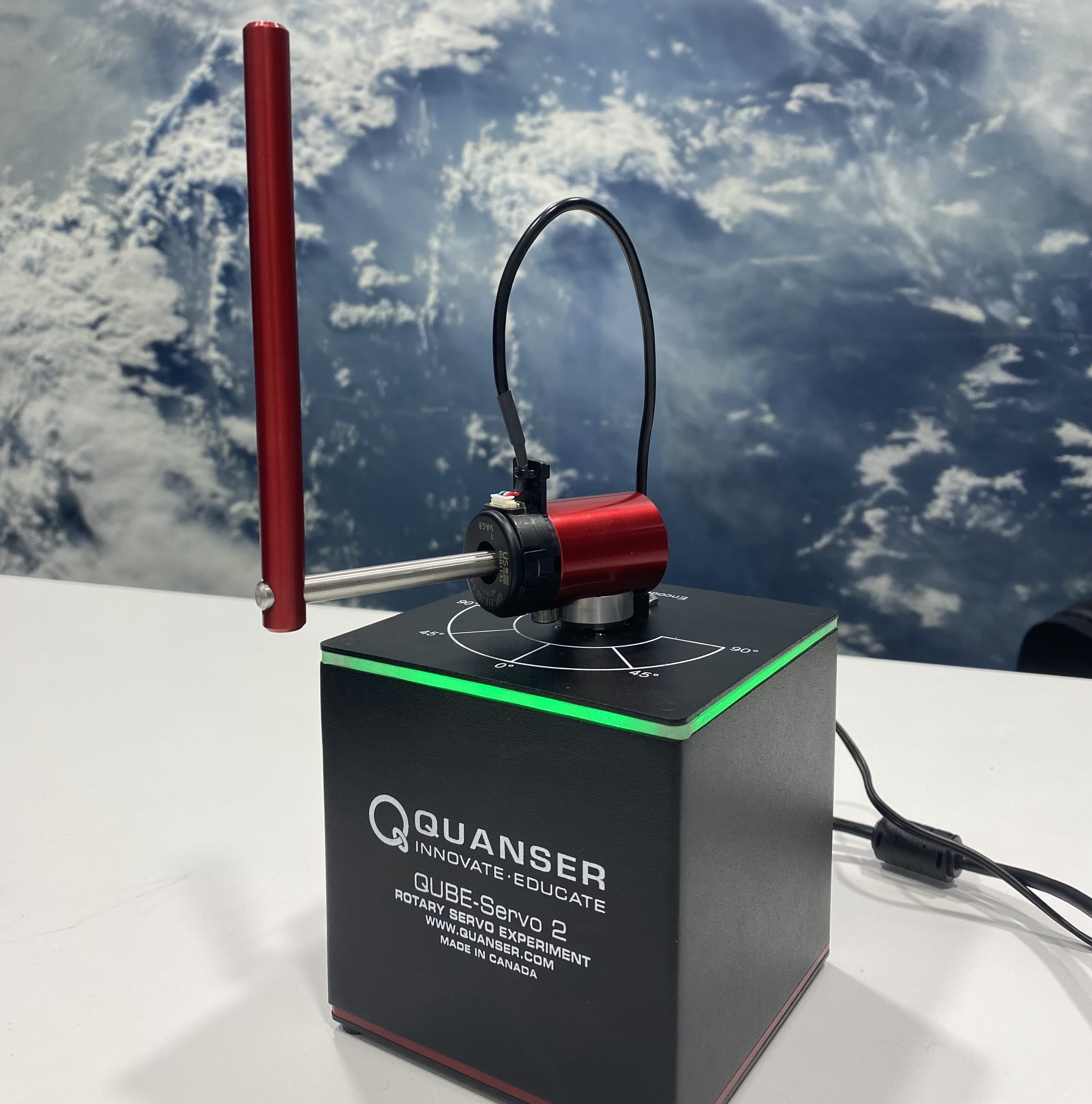

PID, LQR, and energy-based swing-up LQR on Quanser Qube Servo 2.
Participated in MATLAB and Simulink Challenge Projects program. Extended to a conference paper. 
Project paper prepared for CS-E4740 - Federated Learning course. 
Published in 10th International Conference on Recent Advances in Space Technologies (RAST), 2023
Real-time deep learning framework for quadcopters to recognize and track persons of interest autonomously.
Recommended citation: H. E. Dursun, E. C. Güven, B. Avcı, and T. Kumbasar. (2023). "Recognizing and Tracking Person of Interest: A Real-Time Efficient Deep Learning Based Method for Quadcopters." RAST. Istanbul, Turkey.
Download Paper
Published in IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), 2023
A novel approach to uncertainty quantification using General Type-2 Fuzzy Systems for reliable and precise predictions.
Recommended citation: B. Avcı, A. Beke, and T. Kumbasar. (2023). "Towards Reliable Uncertainty Quantification and High Precision with General Type-2 Fuzzy Systems." IEEE FUZZ-IEEE. Songdo Incheon, Korea.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.