Modelling and Control of a Rotary Inverted Pendulum
PID, LQR, and energy-based swing-up LQR on Quanser Qube Servo 2. 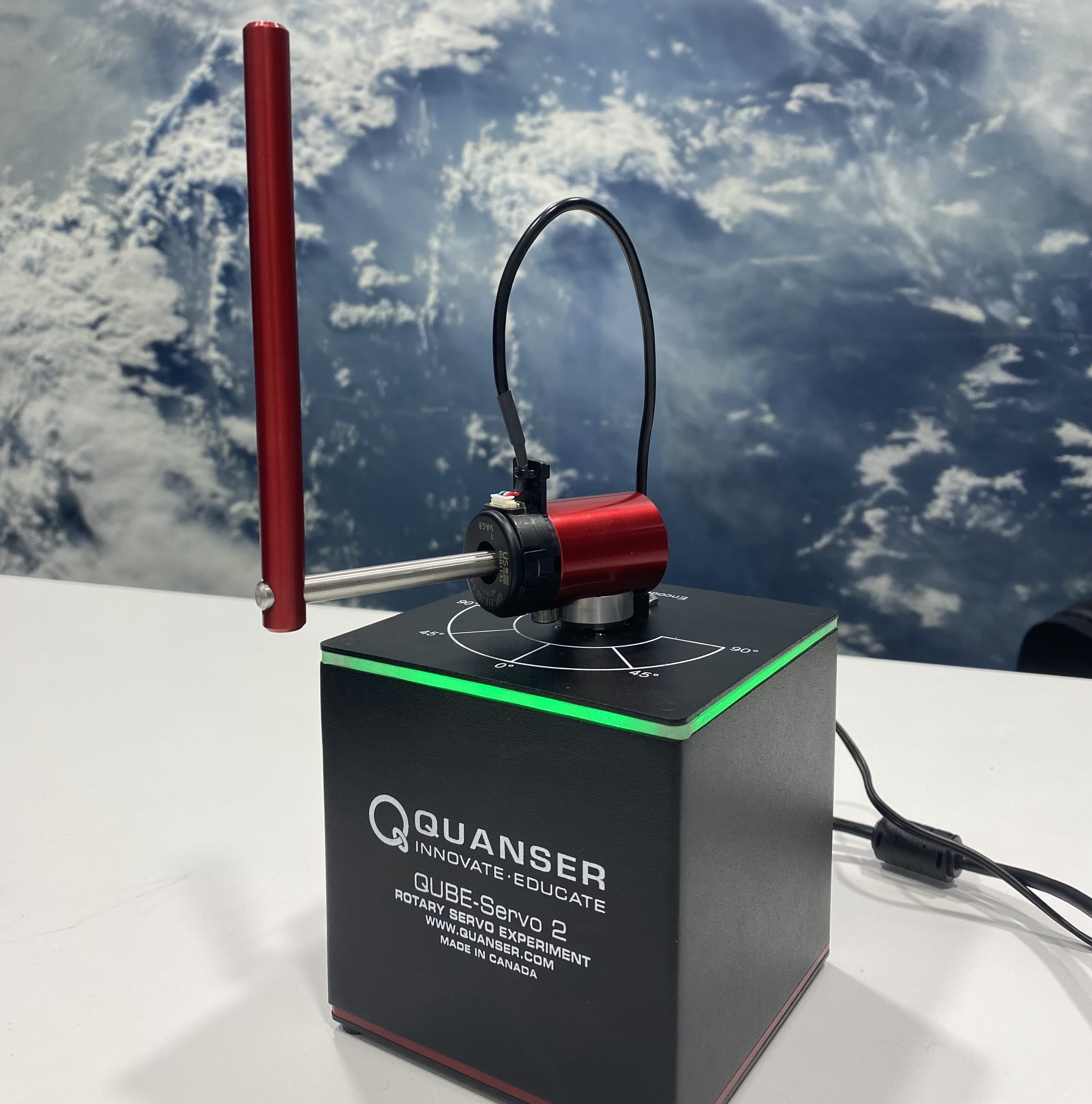

PID, LQR, and energy-based swing-up LQR on Quanser Qube Servo 2.
Participated in MATLAB and Simulink Challenge Projects program. Extended to a conference paper. 
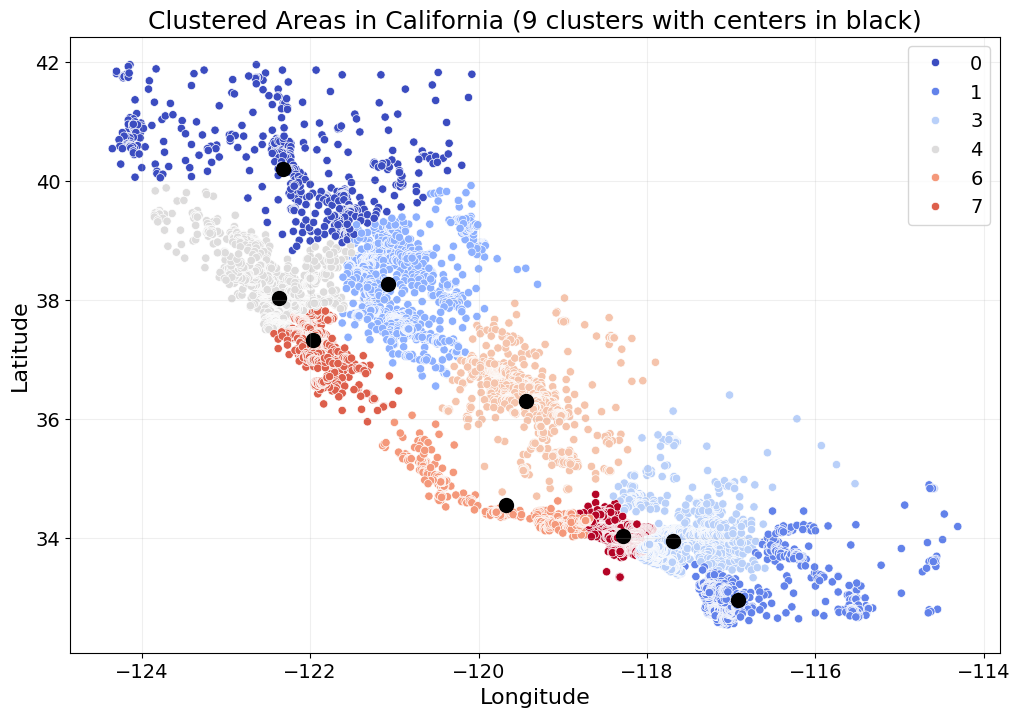
Project paper prepared for CS-E4740 - Federated Learning course.